 |
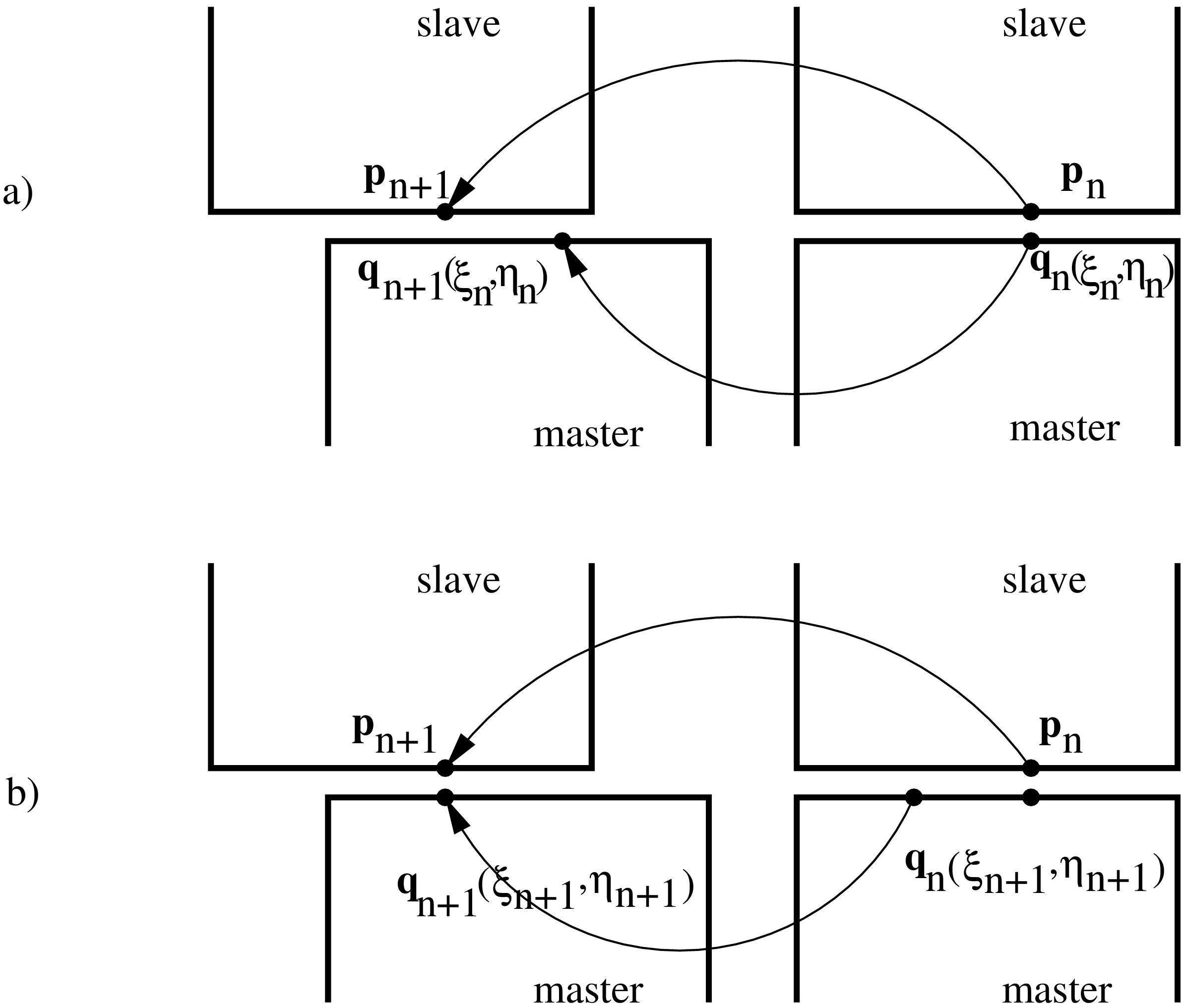
接線方向の接触剛性行列を求めるためには、まず図114の a) を見てください。時刻 tn で特徴づけられるある時間増分の開始時、スレーブ節点の位置を pn とし、それと対応するマスター側の投影ベクトルを qn とします。時刻 tn+1 で特徴づけられる時間増分の終了時、両者はそれぞれ位置 pn+1 と qn+1 へ移動します。この増分の間に差分変位は以下の式を満たすベクトル s によって変化します。
ここで qn は以下を満たします。
 |
(86) |
ローカル座標は時刻 tn での値であることに注意してください。接線方向変位の差分は以下の様に変形されます。
| t = s - n | (87) |
ここで s は以下の通りです。
| s = s・n | (88) |
ui に対する導関数は以下を満足します(簡単な微分)。
 |
(90) |
また以下の通りです。
 |
(91) |
ξ と η を固定することで r の ui に対する導関数から s の ui に対する導関数が求められます(この導関数は tn+1 でのものであることに注意してください。結果、tn での値の導関数は全て消えます)。
 |
(92) |
物理的には接線方向接触の方程式は以下の様になります(スレーブ節点 p の位置での記述)。
| t = te + tp | (93) |
| FT = Ktte | (94) |
| (95) |
 |
(96) |
まず、接線方向の差分変位の加法型分解の異なる式形を導きます。以下の式から開始します。
| t = te + tp | (97) |
時間微分をとることで以下が得られます。
| (98) |
スリップの発展方程式を代入すると以下の様になります。
 |
(99) |
さらに Kt をかけると次の様になります。
 |
(100) |
有限差分(後退オイラー)を使用してこの式を tn+1 で書くと次の式が得られます。
ここで![]() 、
、![]() です。パラメーター Kt は時間非依存と考えられます。
です。パラメーター Kt は時間非依存と考えられます。
ここで支配方程式を解くためにラジアルリターンアルゴリズムを書き下しておきましょう。時刻 tn での解が既知である、つまり ten と tpn がわかっているとしましょう。接着則を使うと FTn を計算することができます。今。私たちが知りたいのは時刻 tn+1 でのこれら変数なので、全微分された接線方向変位 tn+1 を考えます。まず予備的な接線方向の力![]() を考えます。この力は時刻 tn+1 における力で tn から tn+1 までの間にスリップは起きていないものとします。この仮定は tpn+1=tpn と等価です。従って予備的な接線方向の力は以下を満たします(接着則を参照)
を考えます。この力は時刻 tn+1 における力で tn から tn+1 までの間にスリップは起きていないものとします。この仮定は tpn+1=tpn と等価です。従って予備的な接線方向の力は以下を満たします(接着則を参照)
| (102) |
この式は以下の様に書くこともできます。
| (103) |
さらに次の様にできます。
| (104) |
式(101)を使うと、これは以下と等しくなります。
 |
(105) |
さらに次の様にできます。
最後の式から次が得られます。
| (107) |
また式(106)のかっこ内の項は両方、正の値なので次の様になります。
満足するべき式で残されたのはクーロン・スリップ限界だけです。ここでは2つの可能性があります。
この場合、クーロン・スリップ限界が満たされ、以下の解が求まります。
| (109) |
また以下の様になります。
tn から tn+1 の間でさらにスリップが起きることはありません。
この場合には解をスリップ面に逆写像し、また![]() であることが必要です。式(108)を使うと堅さのパラメーター γ の増加に対する以下の式が導かれます。
であることが必要です。式(108)を使うと堅さのパラメーター γ の増加に対する以下の式が導かれます。
 |
(111) |
これを使用して tp を更新することができます(スリップ発展方程式を使用)。
 |
(112) |
接線方向の力は以下の様に書けます。
 |
(113) |
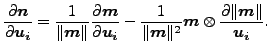
さて
 |
(114) |
であり
![$\displaystyle \frac{\partial }{\partial \boldsymbol{b} } \left (\frac{\boldsymb...
...ght) \right ] \cdot \frac{\partial \boldsymbol{a} }{\partial \boldsymbol{b} },$](img635.png) |
(115) |
です。ここで a と b はベクトルです。これによって以下の接線方向の力の導関数を得られます。
 |
![$\displaystyle = \mu \boldsymbol{\xi }_{n+1} \otimes \left [ \frac{\boldsymbol{F...
...t \frac{\partial \boldsymbol{F_N}_{n+1}}{\partial \boldsymbol{t}_{n+1}} \right]$](img639.png) |
|
 |
(116) |
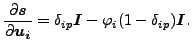
ここで
 |
(117) |
です。最終的に(式110を使用して)以下が得られます。
右辺の量はすべて既にわかっています(式(70)と式(89)を参照)。
CalculiXの節点・面接触では式(85)が変形され簡略化されています。qn+1 が pn+1 と qn の写像だとすると以下の様に変形されています(図114の b) を参照)。
 |
(119) |
図の a) と b) は実質的に同じ、同じものを別の視点で表しているだけです。a) ではマスター面への投影は時刻 tn で行なわれ、差分変位は時刻 tn+1 で計算されます。b) では投影は時刻 tn+1 で行なわれ、差分変位は時刻 tn で計算されます。さて実際の位置は変形前の位置と変形の和として書き表せます。従って p=(X+v)s、q=(X+v)m から以下の様になります。
| (120) |
変形前の位置は時間に依存しないので以下の様に消すことができます。
| (121) |
さらに次の様になります。
| (122) | ||
| (123) |
さらに最後の2つの項も消します。つまり時刻 tn での位置![]() と
と![]() の間の変形の差分は tn から tn+1 の間の移動の差分と比べて無視可能であると見なすのです。すると s の式は以下の様に簡略化できます。
の間の変形の差分は tn から tn+1 の間の移動の差分と比べて無視可能であると見なすのです。すると s の式は以下の様に簡略化できます。
| (124) |
以上から保持すべき量は実際の時刻とインクリメント開始時の時刻での p と q の間の変形の差分であることがわかります。



![$\displaystyle = \mu \boldsymbol{\xi }_{n+1} \otimes \left [ -\boldsymbol{n} \cdot \frac{\partial \boldsymbol{F_N}_{n+1}}{\partial \boldsymbol{u_i}_{n+1}} \right]$](img643.png)
