第五類 立体機構
第二、第三、第四類は回りツガイの軸が並行し滑りツガイの軸が之と直交する平面機構なるが本類においては然らざる立体機構の諸例を示す(序論における立体機構の定義を見よ)。
90. 発射軸複クランク機構(コニック・ダブル・クランク・チェーン)Conic Double Crank Chain.
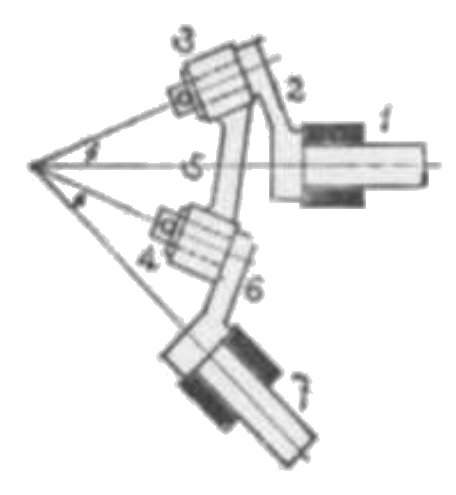
クランク・ピン 3, 4 の各軸線及びクランク軸 1, 7 の中心線は何れも一点において合す。クランク 2 がクランク 6 と相等しければクランク 1.2 の回転はクランク 6.7 を回転すること並行クランクの如し。本運動を円満ならしむるために被動軸 7 にハズミ車を要す。
91. 球関節とコニカル・クランクの立体機構
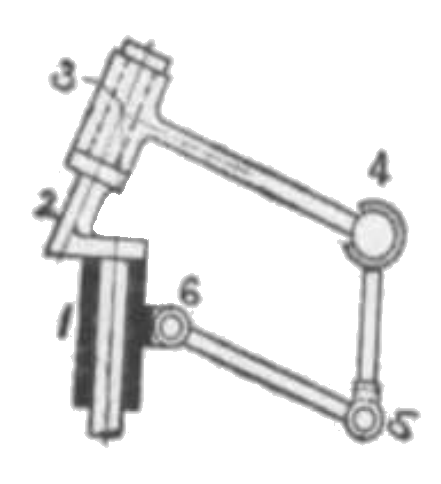
4 はボール・ソケット接手。軸 1 の回転は揺腕 5.6 を揺動せしむ。
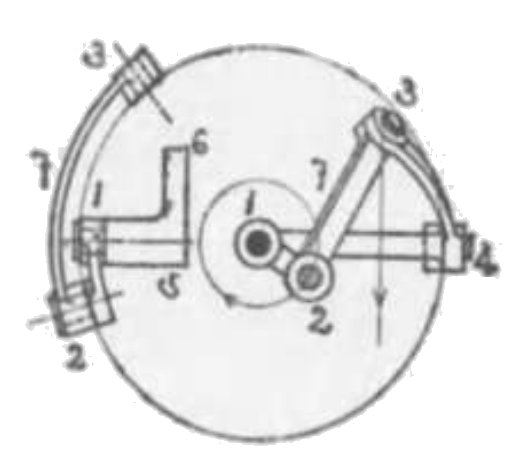
92. エキセンと揺腕の立体機構
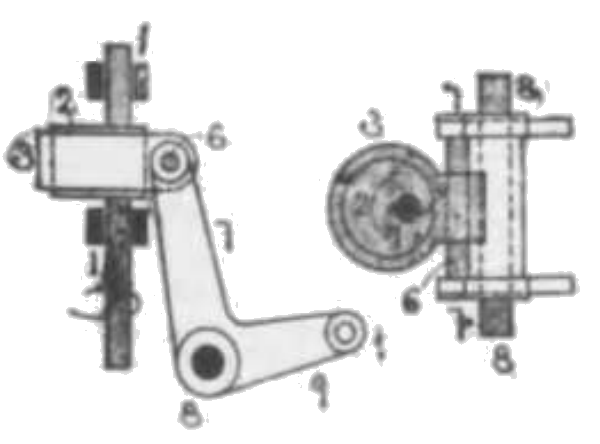
エキセン 2, 3 の円板 2 は軸方向にも滑る。軸 1 の回転はエキセンによりてベル・クランク 7.9 を揺動せしむ。
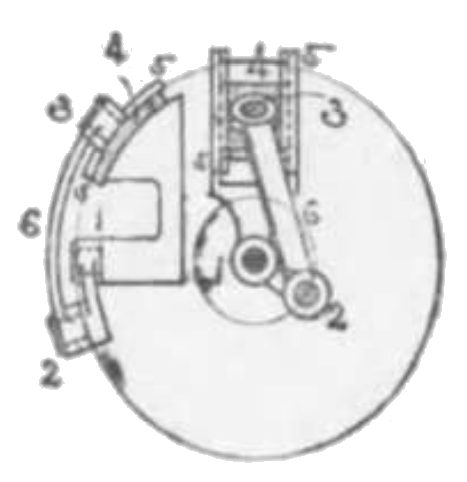
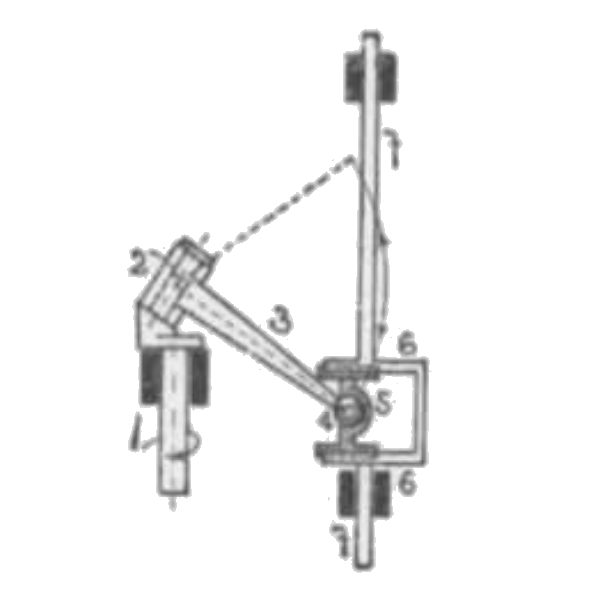
93. クランク、揺腕、二重サヤの立体機構
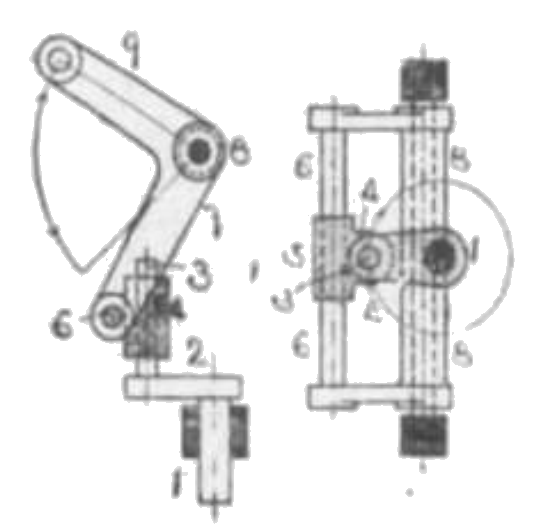
二重サヤ(スリーブ)4.5 は一体にして 4 はクランク 2 のピン 3 と組み、5 は揺腕のピン 6 と組みてそれぞれ回りツガイを為し同時に軸方向にも滑る。軸 1 の回転はベル・クランク 7.9 を揺動せしむ。ただし左図において軸 8, 6 の軸線は水平に、軸 1, 3 の軸線は垂直なり。
94. 発射軸四ツ棒機構(コニック・クワドリック・チェーン)Conic Quadric Chain.
回りツガイ 1, 2, 3, 4 の軸の中心線は並行せずして何れも同一点を通過す。1.2 は最短リンクなり。クランク 1.2 の回転はリンク 7 によりてリンク 8 を揺動せしむ。この機構は第二類の説明の如く敷衍し得。
95. 発射軸滑り子クランク機構(コニック・スライダー・クランク・チェーン)Conic Slider Crank Chain.
回りツガイ 1, 2, 3 の軸の中心線は何れも同一点を通過し滑りツガイ 4.5 は以上の交点を中心とする球面に沿って運動す。クランク 1.2 の回転は滑り子 4 の往復運動を生ず。この機構は第三類の設明の如く敷衍し得。
96. 斜軸クランクと滑り子(其一)Angular Crank Pin and Sliding Rod.
輔 1 が回転するときはロッド 7 は往復直線運動を為す。
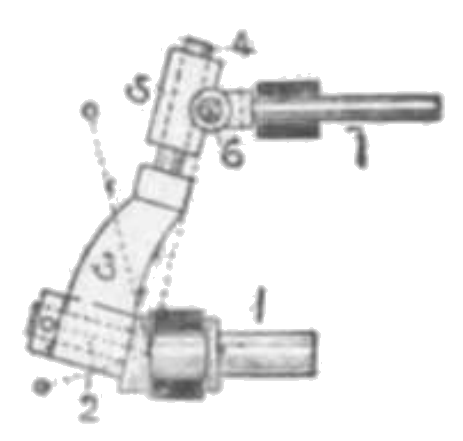
97. 同(其二)
水平軸 1 の左端に傾斜して突出せるピン 2 はテコ 3 と回りツガイを為す。
滑りツガイ 4, 5 は水平運動を為す。スロット 4 には穴ありて之にテコ 3 の下端が入る。ハンドル 6 の回転によりてスロット 4 は左右に振動す。
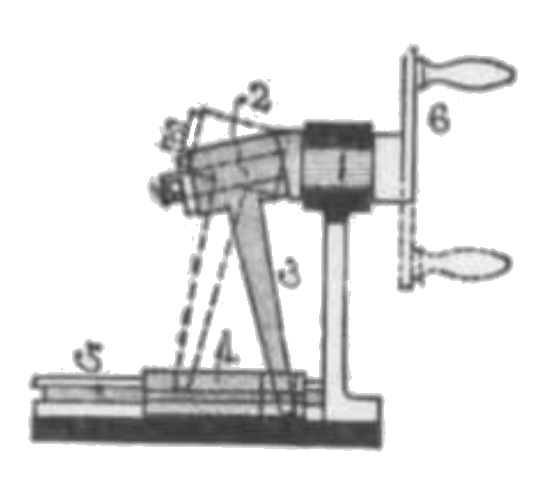
98. 同(其三)
1, 2, 3, 4 は機構 (97) と同一の組合なり。テコ 3 の先端とスロット 5 とは球面ツガイを為し 5, 6 は滑りツガイと為す。垂直軸 1 の回転は垂直ロッド 7 に上下往復運動を与う。
99. 肘棒プレス(トグル・ロッド・プレス)Toggle-rod Press.
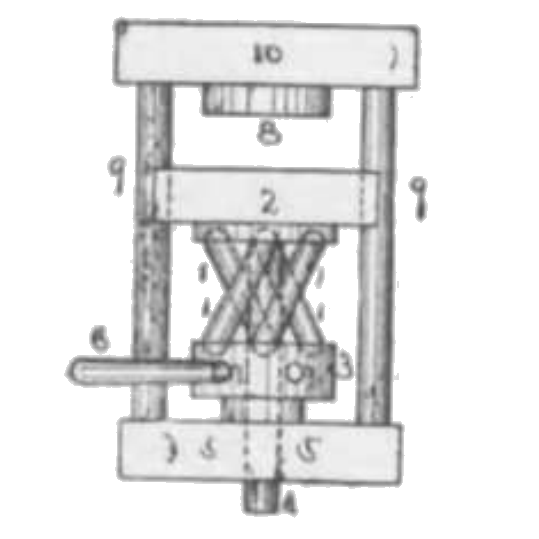
棒 6 を廻して 8, 2 間の物体を圧縮し得。ただし傾斜せ る数多の棒 1 がやや垂直の位置に近づきたるときに圧縮力甚だ強大となる。