第十三類 パンタグラフ Pantograph.(縮図器)
本類は与えられたる線図を相似形に縮図し又は引延ばす機構及び之に類する機構を集む。パンタグラフ Pantagraph とも綴る。
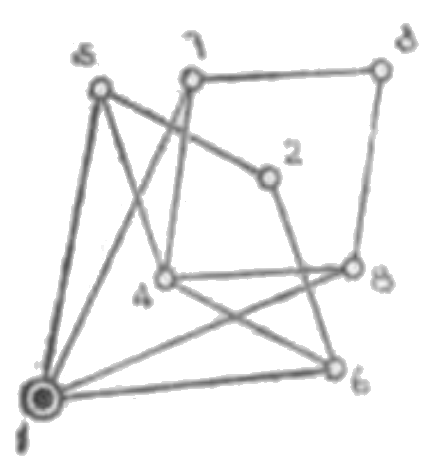
290. バンタグラフ Pantograph.
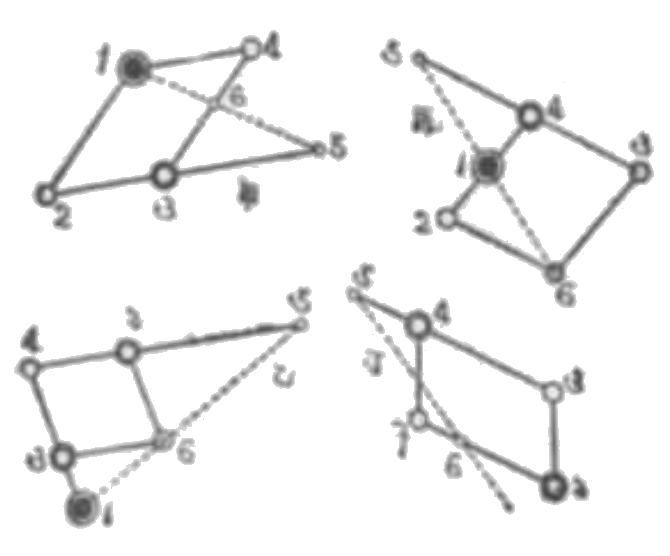
1234(甲図)、2436(乙及び丙図)、2347(丁図)は何れも並行リンク。甲図においては 12=34, 23=41。46:36=14:35 然るときは点 1, 6, 5 は一直線上にありて点 1 を固定するときは点 5, 6 の描く線図は相似形にしてその大きさの比は 25:23 なり。相似中心は点 1 なり。
291. 食違いパンタグラフ(其一)Skew Pantograph.(シルベスター縮図器)
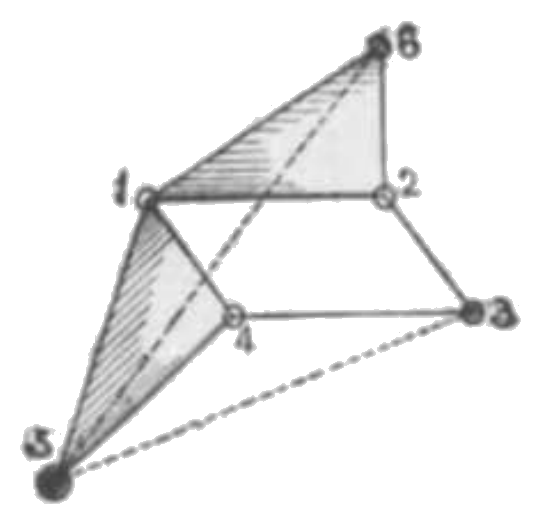
1234 は平行四辺形にして △126 と △541 は相似形なり。中心 5 を固定するときは両点 3, 6 は同時に相似形を描きその大きさの比は 45:15 なり。シルベスター教授はプラギヨグラフ Pragiograph と命名せり。ただし点 5 を中心としてその一つを角 154 だけ回転することによりて 5 を相似の中心とする相似の位置に移し得。
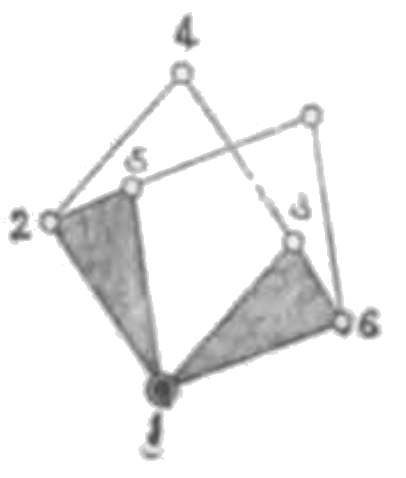
292. 同(其二)
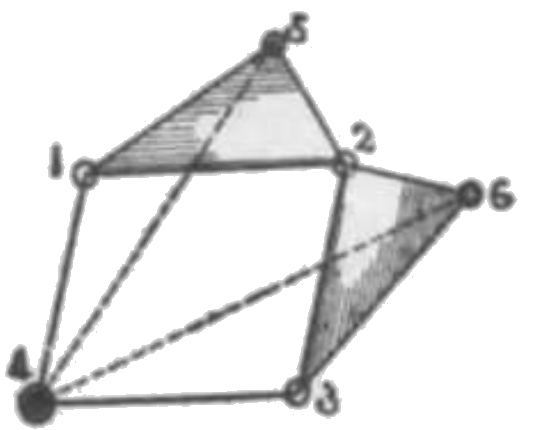
1234 は平行四辺形にして △125 と △362 は相似形なり。中心 4 を固定するときは点 5, 6 の同時に描く線図は相似にして両者の大きさの比は 15:12 なり。点 4 を中心としてその一つを角 215 だけ廻さば 4 を相似中心とする相似の位置に移し得。
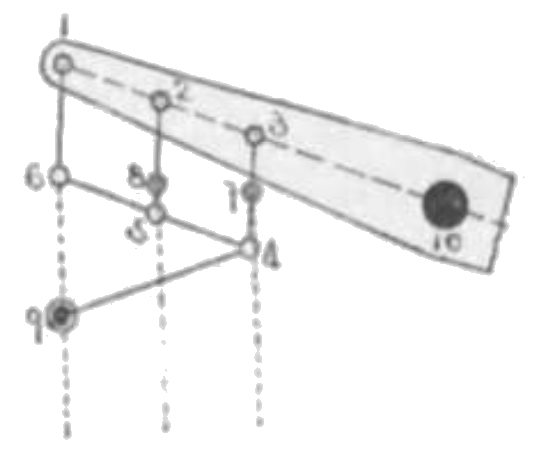
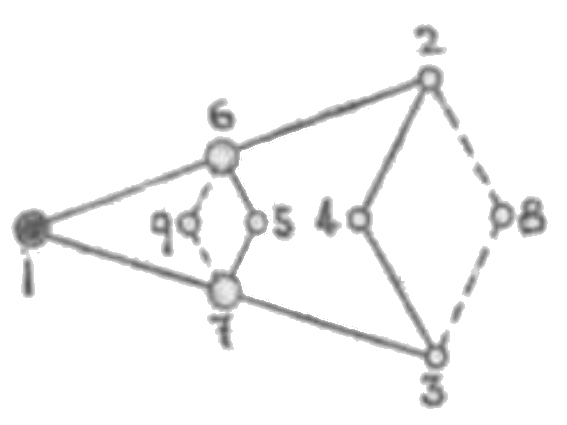
293. インジケーター・リグ Indicator Rig.(インジケーター糸張)
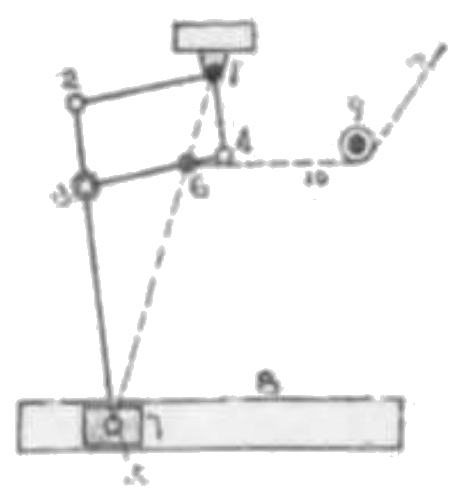
1, 2, 3, 4, 5, 6 はパンタグラフ (290) にして 1, 6, 5 は一直線上の三点なり。之がためには 36:64=53:32。5 の端はエンジンのクロスヘッド・ピン又はピストンに取付らる。6 よりの糸 10 はインジケーターの糸に連結す。 クロス・ヘッド又はピストン 7 の左右往復運動は 6 点の運動と相似なり。蒸気機関又は内燃機関のインジケーター線図を描くインジケーターに用いられる。
294. ワット直線運動とパンタグラフの組合
1256, 2345 は並行リンク。6, 8, 7, 10 は一直線上にある諸点 (290) 943.10 はワット直線連動。6, 8, 7 より垂下するリンクは何れも上下直線運動を為す。何となれば点 7 が上下直線運動を為し点 6, 8 は之と相似に上下直線運動を為す。本機はワット天秤機関に用いらる。
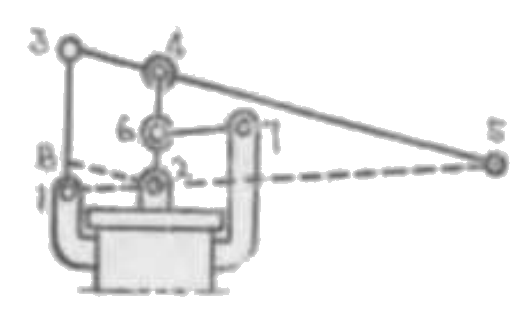
295. トムソン・インジケーター “Thompson” Indicator.
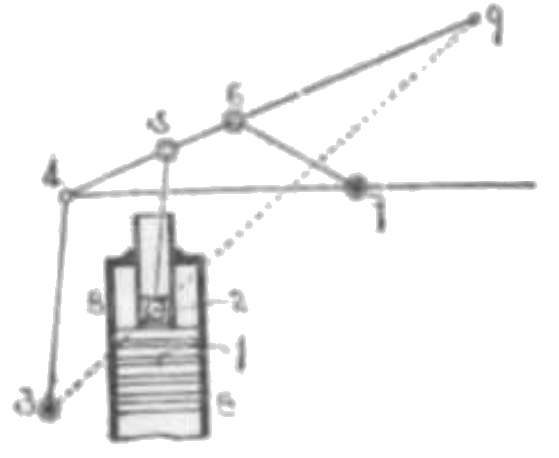
点 4 は少垂直なるリンク 34 の端にして水平に運動す。34697 はイナゴ形近似直線運動 (277) なり。点 2 は直線 39 上にありて 52:43=95:94。点 2 即ちピストン 1 の上下運動は点 9 の上下運動と相似なり即ち点 9 はピストン 1 の上下運動を拡大して表わす。
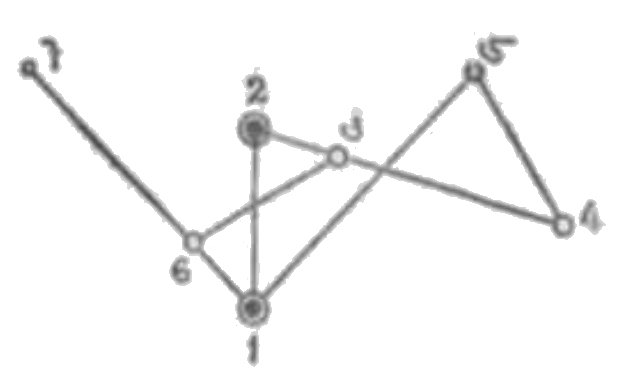
296. ローテーター Rotator.(図回転器)
1, 2, 3, 4, 5, 6, 7 は何れも回りツガイにして 12, 13, 15, 16, 42, 43, 75, 76 は相等しく且 25, 36 は相等し。
軸 1 を固定し点 4 にて線図を描くときは点 7 は前者と同一の線図を描き、その位置は 1 を中心として前者を角 215 だけ回転したる位置にあり。(291), (293) も本機構と同作用にし得。
297. ケムプ・リバーソル “Kempe” Reversor.
12=45=36, 15=24=17, 23=16=122÷24
リンク 15 が如何なる位置にあるも角 512 と角 217 とは相等し。リンク 12 が其直線上に動く場合両点 5, 7 は直線 12 を対称の軸とせる線図を描く。
298. インバーソル・パンタグラフ Inversor Pantograph.
15264, 17384 はポーセリエ・セル (300) なり。
軸 1 を固定するときは両点 2, 3 はそれぞれ点 1 を相以の 中心とする相似形を描く。
299. コールマック・インバーソル “P. Cormack” Inversor.
リンク 12=13, 16=17, 24=34, 65=75 にして二点 2, 6 及び 3, 7 はそれぞれ点 1 と一直線を為す。
而して 65:24=16:12
1, 4, 5 三点は一直線上にありて 15, 14 は定数なり。故に 1 を固定するときは点 4, 5 はインバース図形を描く。特別の場合として (260) の如く点 5 が 1 を通過する円運動を為せば点 4 は直線運動を為す。5 を 9 に又 4 を 8 に折し返せば点線にて示す如き同性質の機構を得。5 と 8 を採らば (298) と同性質の機構を得。
299.1. クロスビー・インジケーター Crosby Indicator.
2 はピストン上部のピン接合((295) を見よ)。13, 24 は 並行し三点 1, 2, 5 を一直線上にあらしむ。この条件に適する為には 28 を 34 に並行たらしめ並行リンク 3428 を作りて 35:45=13:24 としてパンタグラフ 123458 を得れば 5 の上下直線運動は 2 と相似運動を為す。リンク 24 上の一点 6 の軌跡を求め之を中心 7、半径 67 の円弧で代表せしめリンク 28 を外してリンク 67 を入れ代える。