第二十六類 軸接手 Shaft Coupling.
本類は二個の軸を連結する数多の接手及び特種の伝動軸接手装置をも集む。
640. フランジ接手 Flange Coupling.
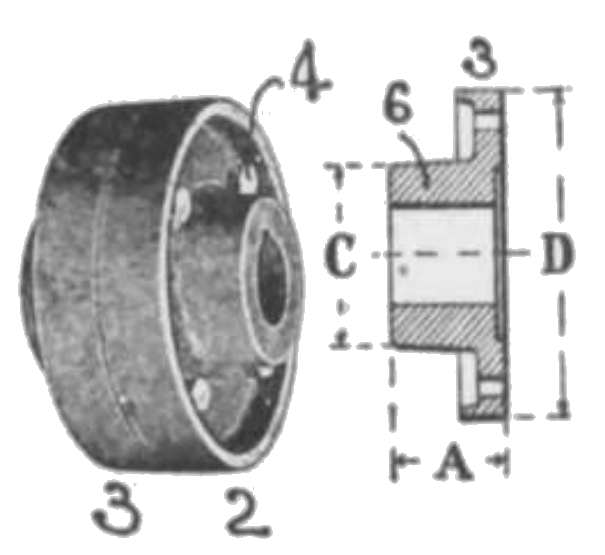
伝動軸を接続する場合に用いらる。両軸端にそれぞれ円板状の鍔 2, 3 をキー付す。この鍔を数多のボルト 4 にて結合す。しばしば取外しを要する場所に用いて便なり。輪周を幅広く縁付せるはボルト頭及びナットが他物に触れざるにより安全なり。
641. 筒形接手 Box Coupling.
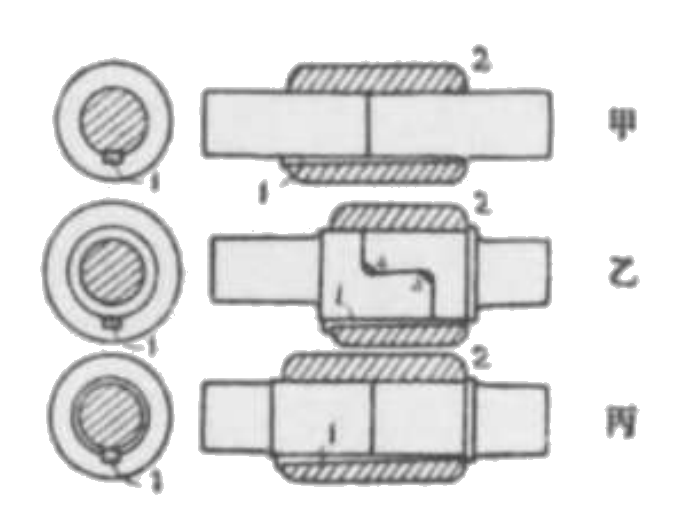
甲、丙は両軸を突合せにしキー 1 を付し円筒鞘 2 を嵌めたるもの。バット・マフ接手 Butt Muff の別名あり。乙は両軸を 3, 3 に示す如く食違いに切欠きて之を接続したる式にしてラップ・マフ接手 Lap Muff の別名あり。因にマフは西洋婦人の暖手套にして筒形なり。
642. 筒形掴接手 Friction Clip Coupling.
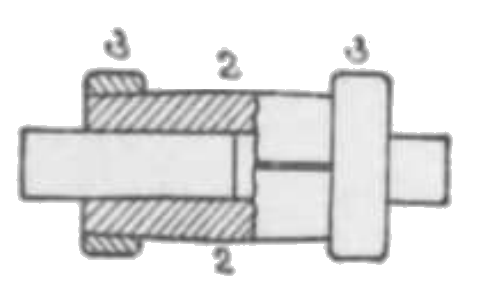
二片 2, 9 は中央より左右に円錐形と為し軸を掴み之を環 3, 3 が締む。環を強く打ち込めば 2, 2 は軸を強く握りて滑らず。稀に滑りを考えてキーを用いるものもあり。
643. セラース円錐接手 “Sellers” Conical Coupling.
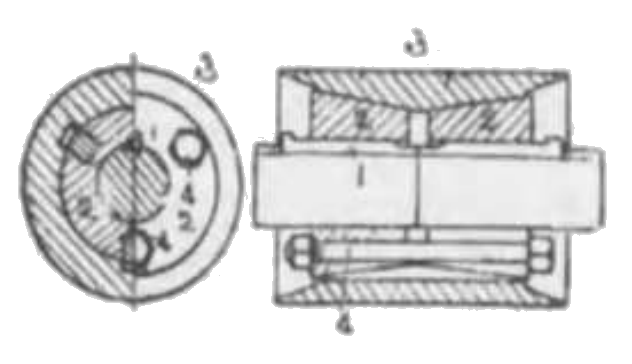
円錐部 2, 2 はその一ヶ所切欠かれ且キーにてそれぞれ両軸端 1, 1 及び円筒 3 に結合す。ボルト 5 を締むるときは弾性によりて 2, 2 は強く 3 の内部円錐内に入り因て生ずる摩擦はキーなくとも大なる力を伝う。図はキーを用いたる場合を示す。
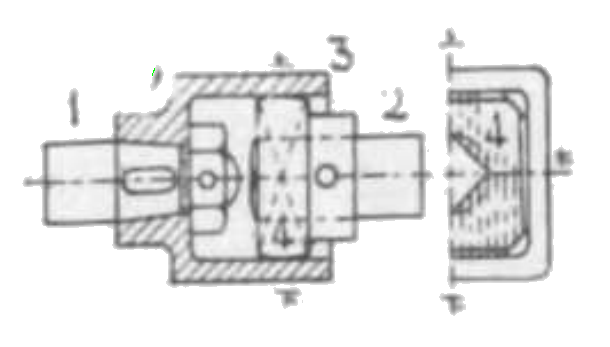
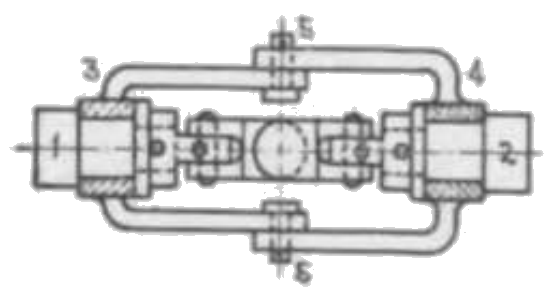
644. 割筒形接手 Split Box Coupling.

(641) の筒形を二分して左右各三本のボルト 4 を以て綴ず。 キー 5 は両軸 1, 1 に共通に嵌めらる。ボルト 4 の頭及びナットは円柱面 3 よりも凹めるを以て回転に当り他物の触るるも巻付く危険少なし。
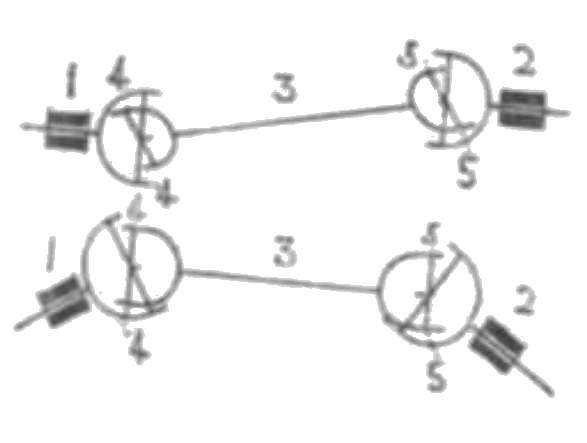
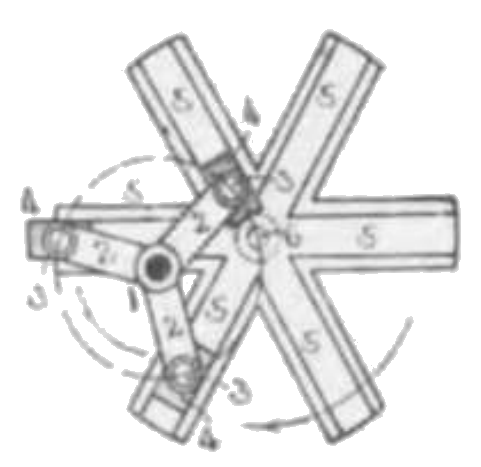
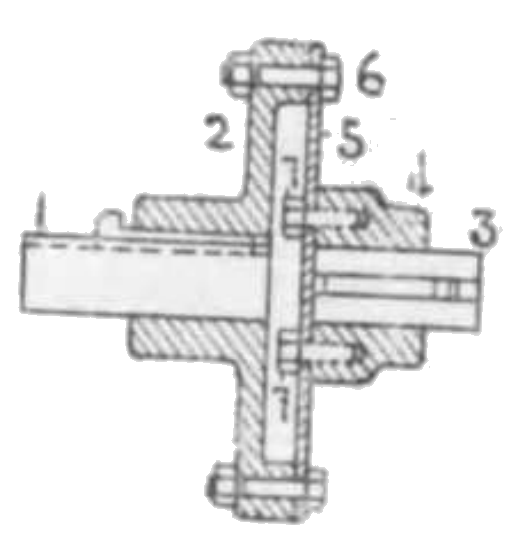
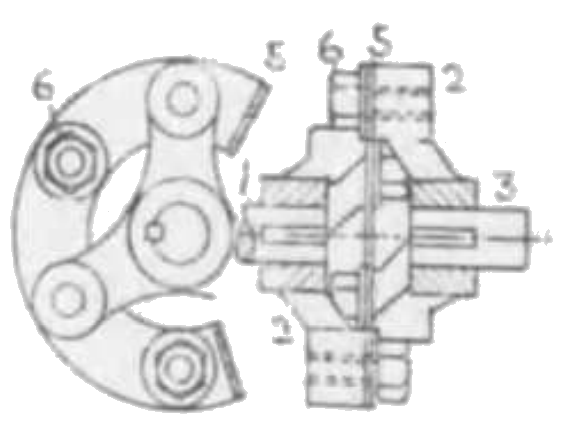
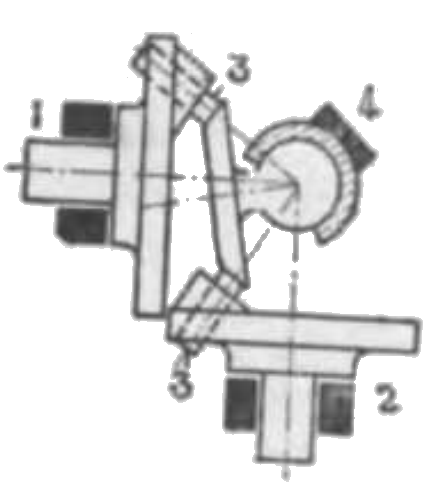
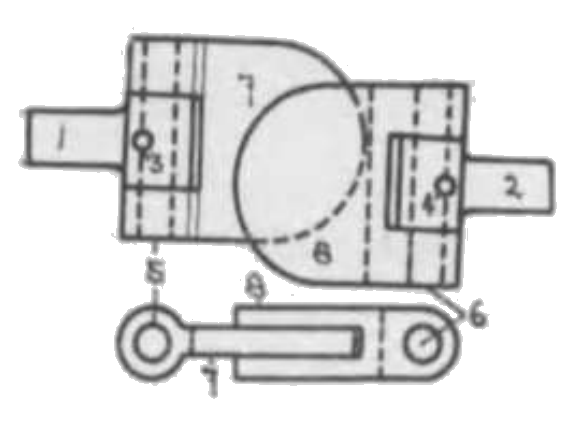
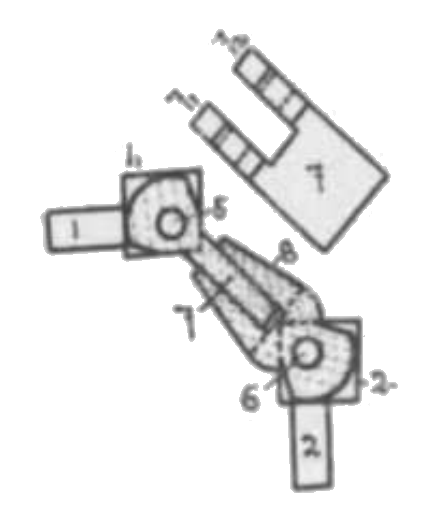
645. リンクたわみ接手 Elastic Link Coupling.
5, 5’ は円板 Disc 3 より突起するピンは円板 4 より突起するピン。両者を連結するに革リンク 7, 7’ を以てす。軸 1 の矢の方向の回転は軸 2 を回転す。両軸の位置が多少狂うも動力を伝え得。リンクは二本以上にても可なり。ピンを数本出し且リンクの代わりに一枚の円形ゴム又は革を以てせるをラッファード接手 Raffard’s coupling と言う。
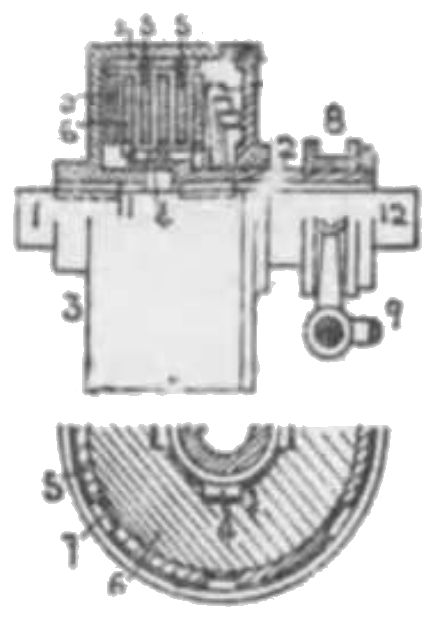
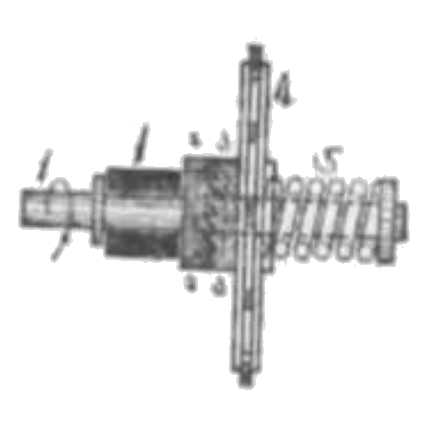
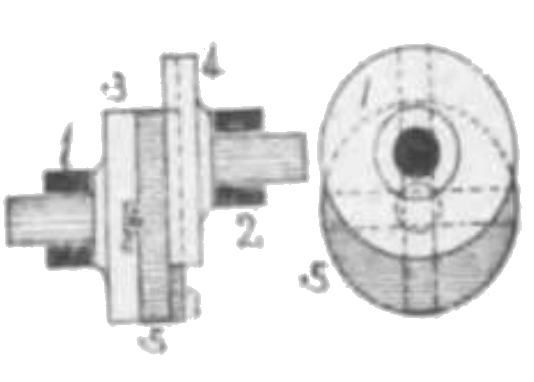
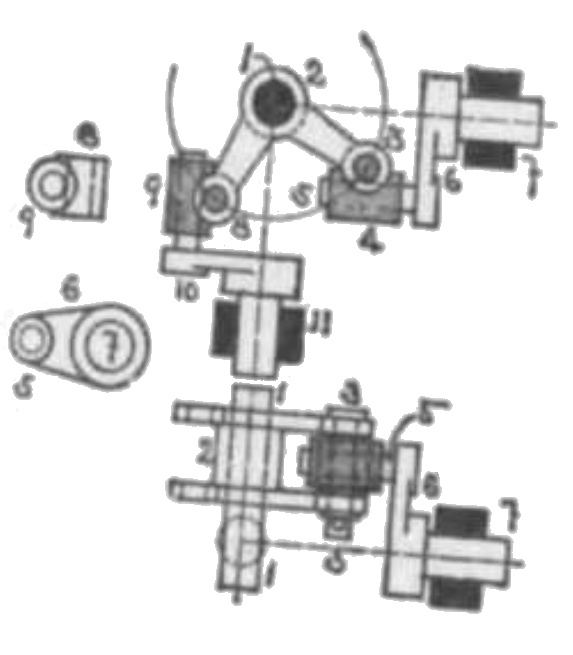
646. 円錐クラッチ Cone Clutch.
両軸 1, 6 の軸線は一直線なり。9 はフランジ 2, 3 の相接触する円錐面。3 はキーと溝によりて軸 6 に対して左右に動くが共に回転す。7 を左へ押し付くれば軸 1, 6 は共に回転すれども 7 を右へ開かば 1, 6 の接合は外づる。動力掛始めに当り接合部 9 の滑るために衝動少なし。鍔 4 の右側に (648), (649) に示す如く圧縮バネを取付くるときは 8 を下に押すときのみ 2, 3 は外れ 8 を押されれば 2, 3 は掛かる。自動車等にては円錐面にライニング(石綿と線金を織込みたるもの又は革)を張るを例とす。
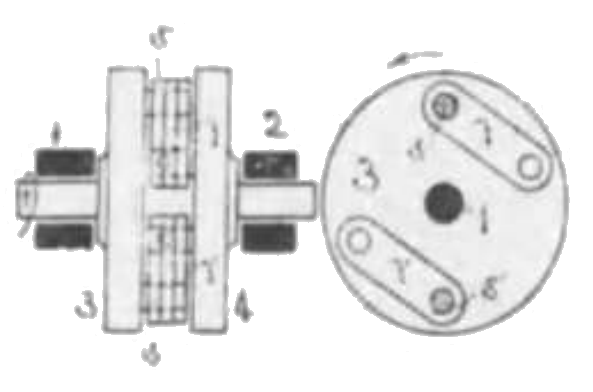
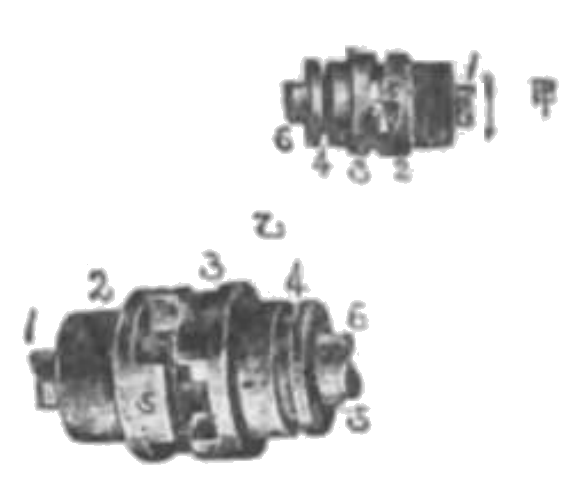
647. ウェストン摩擦クラッチ “Weston” Friction Clutch.
外筒 7 の内壁には軸に並行なる数多の凸筋あり。数多の木製輪 6 は之に妨げられて 7 に対して廻る能わず。6 の間に挟まれたる金属製輪(リング)5 は内筒 3 の凸筋 4, 4 により内筒 3 と共に回転するも軸方向に動くは自由なり。外筒 7 の殻 8 はキーと溝の仕掛 9 によりて軸 1 と共に回転するが軸に沿って動くは自由なり。内筒 3 と一体を為す歯車 2 は軸 1 上に遊動す。8 を左に強く押すときは 1, 7, 2 は一体となりて回転す。然れども 8 を右に寄するときは軸 1 が回転するも 2 は回転せず。3 を甲軸端に固定し 9 を乙軸端にし以て両軸を突き合せにするときは軸接手となる。
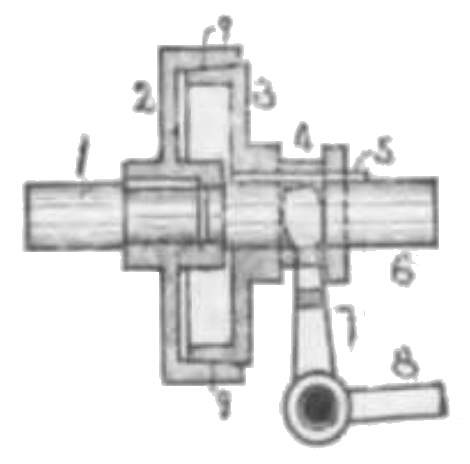
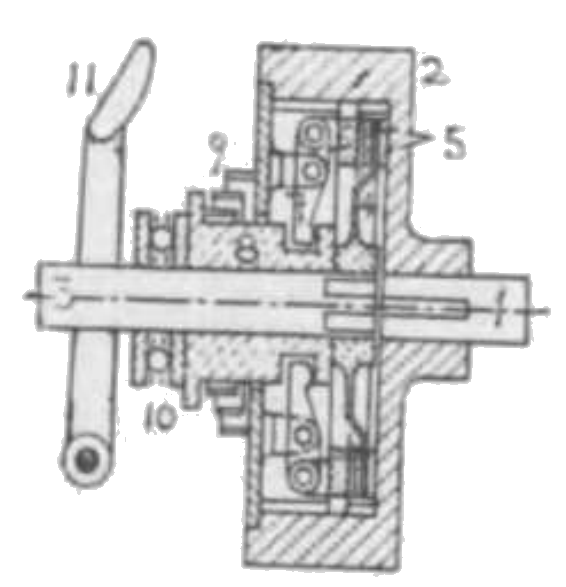
648. 多板クラッチ Multiple Disc Clutch.
(647) と同理の構造なり。軸 1 を動者、軸 12 を被動者とす。円板 6 はサヤ 2 の左部の数個の縦筋 4 によりて両者共に回転す。同様に円板 5 はケーシング(室)3 の内壁の数個の縦筋 7 によりて両者共に回転す。円錘蔓巻バネ 10 は自由の状態にありては強く円板 6, 5 を押す。サヤ 2 はキーと溝の仕掛にて軸 12 と共に回転するが軸の方向へ動き得。テコ 9 を自由に置くときはバネ 10 は円板を押しその摩擦によりて両軸 1, 12 は共に回転するが 9 によりてサヤ 2 を右に動かせばバネ 12 は円板を押さざるにより軸 12 は回転せず。9 の押を緩むるときは板は滑りて軸 12 は軸 1 よりも遅く回転す。されば掛け始めの衝動を防ぎ得。自動車に応用せらる。
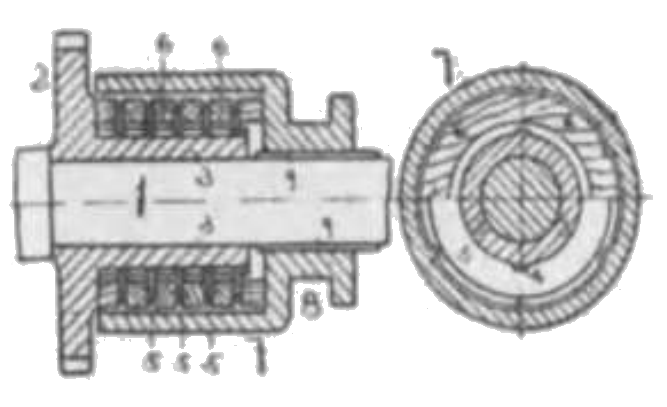
649. 単板クラッチ Single Disc Clutch.
たわむ円板 4 は軸 4 に固定しその周の両面には革又は石綿ライニングを張る。自由の状態にありてはバネ 9 は 8 を左方へ押し之によりてテコ 7 は押輪 6 を右方へ押すにより 1, 3 両軸は共に回転す。テコ 11 を右へ押さばバネ 9 は圧縮せられ之によりて 5 の摩擦も失い 1 は 3 を廻さず。自動車に応用せらる。
650. ランニング・フェース・ラチェット Running Face Ratchet.(鋸歯接手)(其一)

フェース・ラチェット 2, 3 はその縁面に鋸歯を有し 2 は軸 1 に固定す。テコ 5 を矢の方向に下ぐるれば 3 は左に移りて軸上に遊動す。図示の如く両歯が噛むときは軸 1 の矢の方向の回転は 3, 4 を回転せしむ。2, 3 の噛合を外づすときは軸 1 の回転は 3, 4 に伝らず。軸 1 が矢と反対に回転するときは 2, 3 の噛合外づる。テコ 5 の代わりに (651) に示す如く圧縮バネ 5 を用いるものもあり。
651. 同(其二)
1, 2, 3 は (650) と同じく 1, 2 は一体にして円板のボス 3 は軸 1 上に空転す。圧縮バネ 5 によりて左右よりスプロケット車 4 を押す。軸 1 が矢の方向に回転するときは 2, 3 は滑りて回転は 4 に伝わらざれども軸 1 を矢と反対の方向に回転するときは 4 は回転す。然れども回転モーメントが左右板の摩擦によるモーメントよりも大なるに至らば滑りて 4 は廻らず。
652. クラッチ接手
(甲)捩レクラッチ接子 Spiral Clutch Coupling.
(乙)顎クラッチ接子 Jaw Clutch Coupling.
2 は軸 1 に限定す。3 は他軸 6 にキーと溝の仕掛にて滑りツガイを為す。4 には (616) の加き二股リンクが挟む。2, 3 両者が噛みて両軸は動力を伝う。2, 3 の噛合を外さば軸 1 の回転は軸 6 に伝わらず。乙は左右何れにても回転するが甲は逆回転には外づる。
653. 噛合接手 Claw Coupling.
之れ (652) と同一構造なり。(652) は軸 1 が回転中に 3, 5 を噛ますこと困難なり。本設計のものは噛合う顎の隅が著しく丸められたれば回転中にても掛外し得。
654. ピン・クラッチ Pin Clutch.
両軸 1, 6 はその端相接し且軸線同一なり。円板 2 は軸 1 に固定せられ之にピン 9, 9 が突出す。円板 3 には以上のピンの入る穴あり。3 はキー 5 と溝の仕掛にて軸 6 と滑りツガイを為す。図の如き位置にありては軸 1 の回転は軸 6 に伝わらず。然れどもテコ 7 にて 3 を左側に移さばピン 9 は穴 10 に入りて両軸 1, 6 は共に回転す。
655. 細窓クランク接手 Sloted Crank Coupling.

クランク 2 が回転するときはクランクピン 3 はクランク 4 を回転せしむ。依て少しく距たれる並行軸 1, 5 は伝動し得るが回転速比は種々に変化す。
下図は上図を了解し易からしむるために示したるもの。
英人ウィリース博士はピンとスリット Pin and Slit と名づけたり。
656. 角接手 Angle Coupling.
ロッド 4 の端と軸 6 の次は 5 の如くピン接合す。クランク 2 の端 3 をロッド 4 が貫通して滑りツガイを為す。ただし両軸 1, 6 の両軸線とロッド 4 の軸線は同一点に交る。軸 1 の回転は軸 6 を回転せしむるが速比一定ならず。
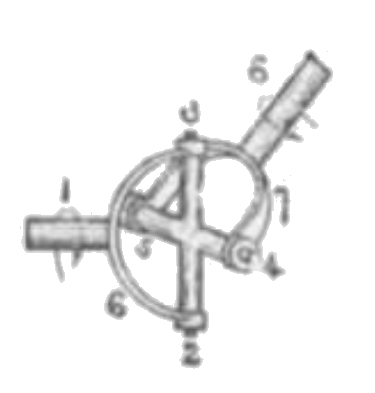
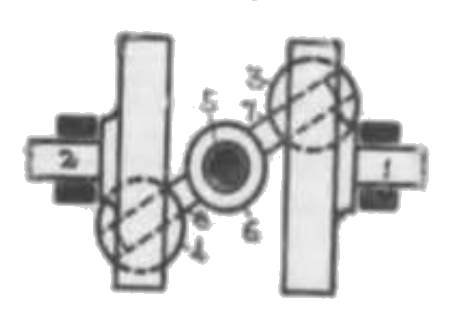
657. フック接手(其一)“Hooke” Joint
(右図)ピン軸 3, 4 の軸線は軸 1 と直角に、ピン軸 5, 6 の軸線は軸 2 と直角にして何れも輪とピン接合す。両軸線 34, 56 は直角に相交わる。
(左図)小軸の軸線 34 は軸 1 に直角に、又軸線 56 も軸 2 に直角に交わり且 34, 53 は直交す。
軸 1 は軸 2 と斜交するも之を回転せしむ。英国機械学者フック博士の創意なり。両軸 1, 2 の速比一定ならず。
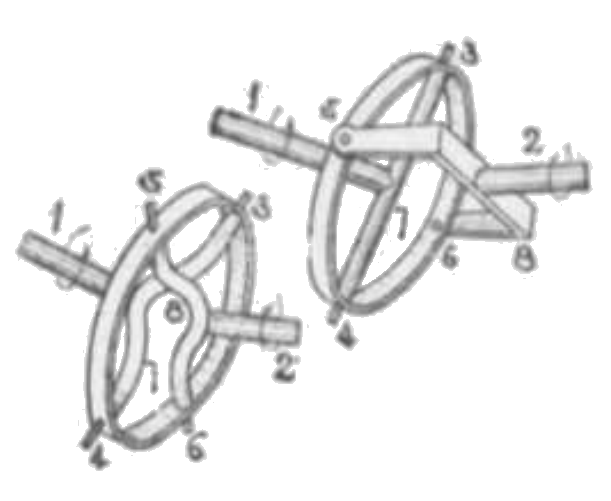
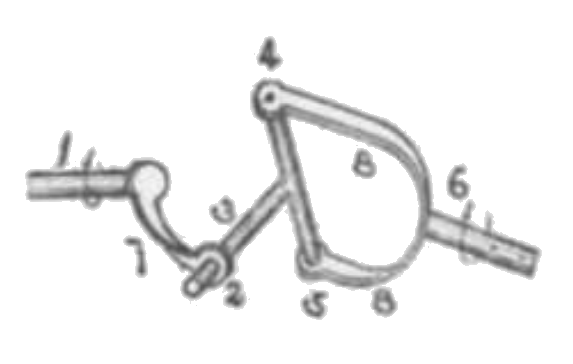
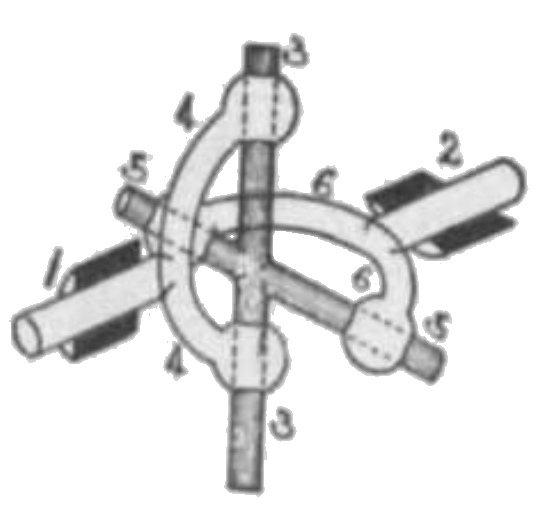
658. 同(其二)
(657) と同一原理にして異なれる構造なり。以下のもの亦然り。半円形股 7 の両軸 2, 3 は輪とピン接合せられその中心線 23 は軸 1 と直交す。同様に股 8 の両端 4, 5 は輪とピン接合せられその中心線 45 は 6 軸と直交す。23, 45 は直角に交わる。軸線 23, 45 の交点は両軸 1, 6 の交点と一致せしむ。
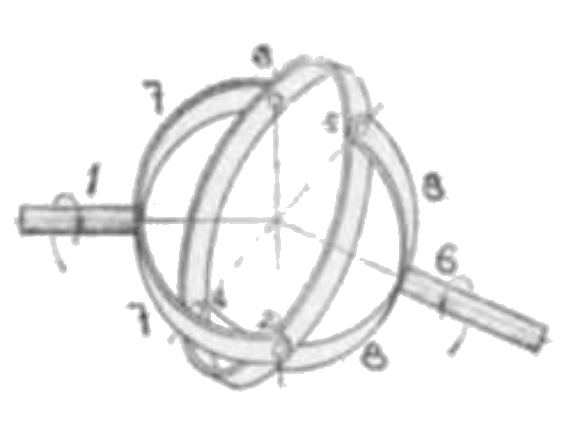
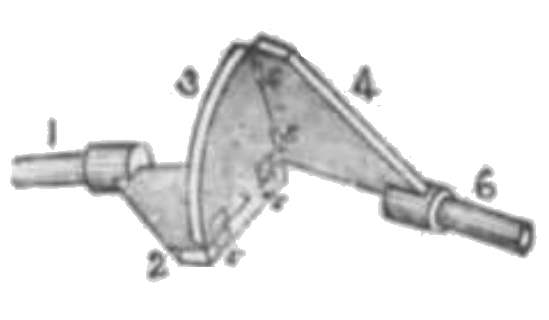
659. 同(其三)
軸 23, 45 は直交し且それぞれ軸 1, 6 に直交す。両軸 1, 6 の軸線の交点は十字軸の交点と一致せしむ。あるいは又軸 1 と小軸 23 の両軸線の交点と軸 6 と小軸 45 の両軸線の交点との両交点の連結線がそれぞれ 23, 45 軸に直角に且 23, 45 が互いに直角なることにても可なり。
660. 同(其四)
T字形直交軸の両軸線の交点を両軸 1, 6 の交点と一致せしむ。4, 5 はそれぞれピン接合にして 2, 3 もピン接合なり。
661. 同(其五)
四分一円の板 3 と板 2, 4 とはそれぞれ蝶番を為す。両者の折目の直線の交点即ち四分一円 3 の中心は軸 1, 6 の交点と一致す。又両者と折目の直線即ち四分一円の半径はそれぞれ軸 1, 6 と直角なり。
662. 同(其六)
フック接手の変態なり。軸 1 の左端 9 には軸線と直角なる並行溝 6 ありてその間に駒 3 が挟まる。球頭 5 に軸 2 の軸線と並行なる割目ありて之に駒 4 が挟まる。駒の両面 3, 4 は直角なり。球 5 の中心を軸 1, 2 の軸線が通過す。ただし 5, 8 は球ツガイなり。
663. フック接手二個を用いて二軸の速度を同一ならしめ得
軸 1, 2 を軸 3 とそれぞれフック接手にて連結す。ただし小軸 41 と 55 とは並行せしむ。上図は軸 1, 2 が並行する場合。下図は軸 1, 2 が軸 3 とそれぞれ等しき角を為す場合。軸 1 の等速回転は軸 2 を等速回転せしむ。軸 3 をキー付差込とすれば 2 を常に 1 に並行に移動し得。
664. いのくちたわみツガリ(井口撓軸接手)
(668) における円板 5 と両側のフランジ面との間に緩みを与うる事によりて左右両軸が並行ならず(15° 位の角を為すも可なり)とも回転を伝え得。故井口博士の発明なり。
665. マルティブル・トランメル・ギヤ Multiple Trammel Gear.(其一)
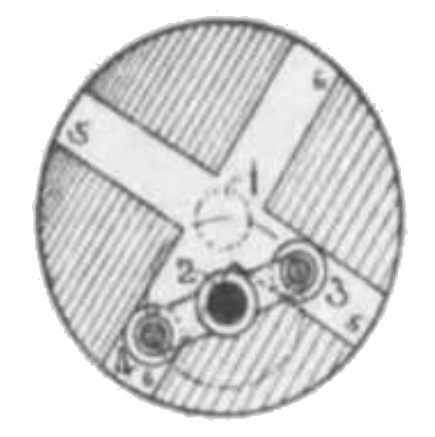
1, 2 はそれぞれ紙面の前後にありて且直角なる並行軸とす。溝 5, 6 は円板の中心において直交する十字形の溝。軸 2 のアーム端のコロ 3, 4 がそれぞれ溝 5, 6 内に緩みなく動く。ただし両平行軸 1, 2 の距離は腕の半径 23, 24 に等しく且中心 3, 2, 4 は一直線を為す。軸 2 の等速二回転は軸 1 を等速に一回転せしむ。
666. 同(其二)
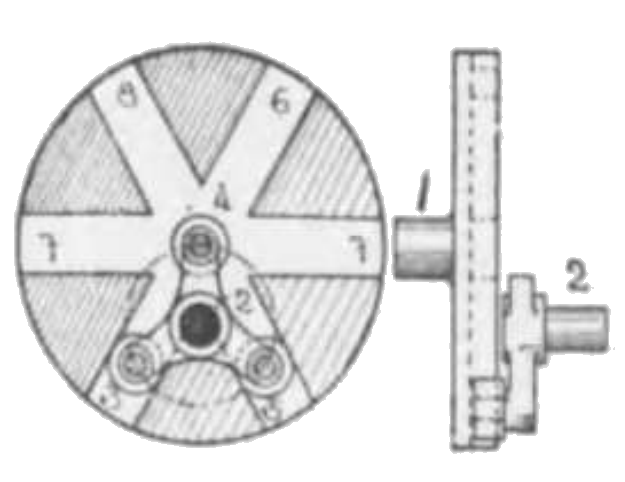
溝 6, 7, 8 は円板の中心においてそれぞれ 60° の角にて交わる。軸 2 より出で且互いに 120° の角を為す腕端にはコロ 3, 4, 5 ありて之がそれぞれ溝 6, 7, 8 内に緩みなく運動す。ただし両並行軸の距離と各腕の半径は相等し。軸 2 の等速二回転は軸 1 を等速に一回転せしむ。
667. 同(其三)
本図は (696) の変態にしてコロの代りに滑り子 4, 4, 4 を以てせり。この設計における面ツガイは (666) よりも大馬力を伝え得且摩耗に耐う。
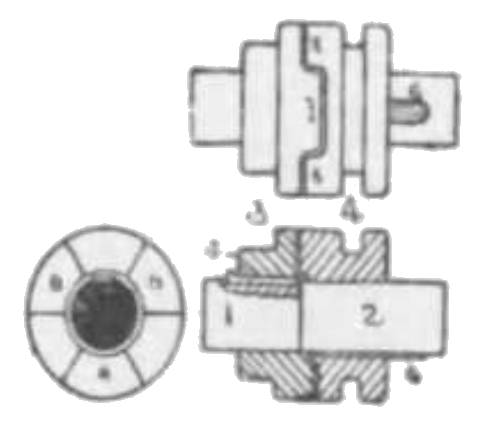
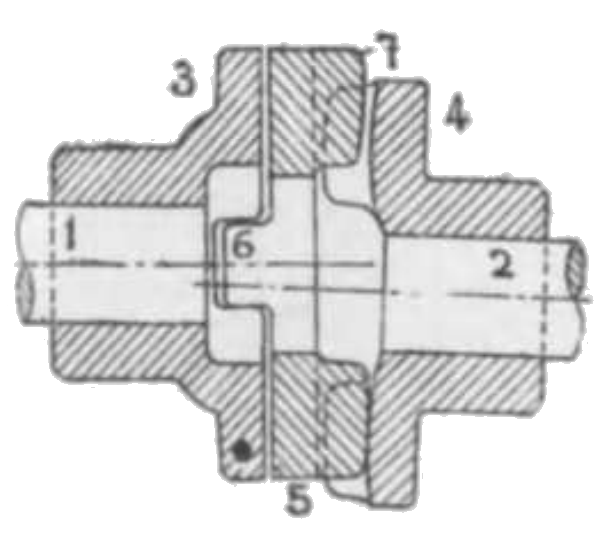
668. オールダム接手(其一)“Oldham” Coupling.
円板 5 の両並行面には互いに直角なる直線の凸筋 6, 7 あり。6 は円板 3 の直径に沿って穿てる溝と滑りツガイを為す。同様に 4, 7 も亦滑りツガイを為す。両軸 1, 2 は並行にして少しく隔たれる軸なり。
軸 1 の等速一回転は軸 2 を等速に一回転せしむ。本機は英人オールダムの発明にして初めて英蘭銀行使用の機械に応用せり。著者日く両滑りツガイの軸線は直角ならずとも上述の性質あり。
669. 同(其二)
両軸 1, 2 は相距れる並行軸。之と直角なる正面に軸線を有する十字棒(クロス・ロッド)33, 55 は互いに直交し且それぞれ腕 44, 66 と滑りツガイを為す。軸 1 の等速一回転は軸 2 を等速に一回転せしむ。(664) の変態とすれば 1, 2 両軸が少しく傾くも可なり。この場合には 3, 5 は丸棒で 4, 6 に差し込まるる構造で足る。
670. 二重滑りクランク接手
接近するも相交わらず且方向異なれる両軸に運動を伝達す。二重滑り子 7, 8 の孔 7 はクランク 12 のピン 3 に対して回転し且摺動し同様に孔 8 はクランクピン 6 に対して回転し且摺動す。両孔 7, 8 の軸線距離は両軸 1, 4 の距離に等し。クランク軸 1 の回転はクランク軸 4 を回転せしむ。両軸の接近の度、両軸の傾斜の度によりて不能の場合あり。両軸 1, 4 が並行するときは並行クランクを形成す((118) を見よ)。
671. ヒッチコック接手 “Hitchcock” Coupling.
ピン 3, 5 の両軸線は直角なり。4 と 5 は回転し且滑動す。8, 9 も亦同様なり。両軸 7, 11 は直交す。両軸 13, 18 は直交す。軸 7 の等速一回転は軸 11 を等速に一回転せしむ。本機はイー・エー・ヒッチコック教授 Prof. E. A. Hitchcock の創意なり。
672. アルモンド接手 “Almond” Coupling.
両軸 5, 7 は直交す。3, 5 はそれぞれ球関節接手。直角に二枝を出せるベルクランクの軸身 2 を固定軸 1 が貫通し回転し且滑動す。4, 6 は何れもピン接合。
軸 5 の等速一回転は軸 7 を等速に一回転せしむ。
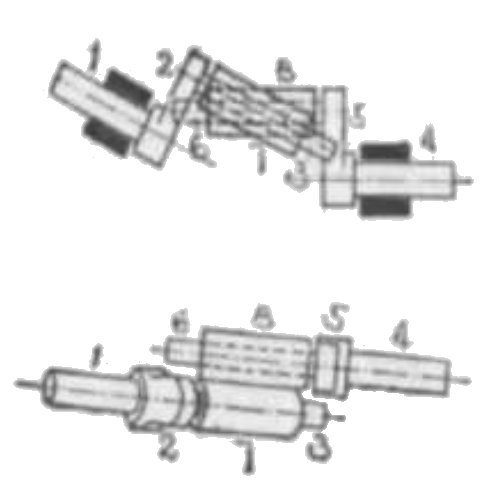
673. ホブソン角接手(其一)
両軸 5, 6 の軸線は直角にして相交る。直角に曲がれる丸棒 2 の両軸はそれぞれ 3, 4 軸頭の穴に差込まれて滑動す。ただし穴の方向はそれぞれ軸 5, 6 に並行し四個の穴は等しき円周上に等分に穿たる。軸 5 の等速一回転は軸 6 を等速に一回転せしむ。
674. 同(其二)
上者と同一の理論より成るものなれども外観を異にす。両端に鍔ある鼓形の筒 3, 4 はそれぞれ直角に曲がれる丸棒 1 の上に回転す。この鍔と直角に曲れる丸棒 2 とは滑りツガイを為す。3 の等速一回転は 4 を等速に一回転せしむ。
675. たわみ接手(其一)Flexible Coupling.
薄き銅板 5 は軸 1 のフランジ(鍔)に数多のボルト 6 にて取付らる。又軸 3 のフランジにも同様ボルト 7 にて取付らる。両軸 1, 3 の軸線は同一直線を為すものなるが銅板 5 の弾性によりて両軸線が多少傾斜する場合にも動力伝達を為し得。即ち (645) と同様の効能あり。銅板はたわみ易きと且強さを増すために薄板を数枚重ね用いるもあり。
676. 同(其二)
(675) と全く同一なる機構にして構造を異にす。1, 3 両軸には三本の腕を出すボスを取付け金属製中空円板 5 をボルト 6 にて腕に取付く。5 には革を用いる場合あり。
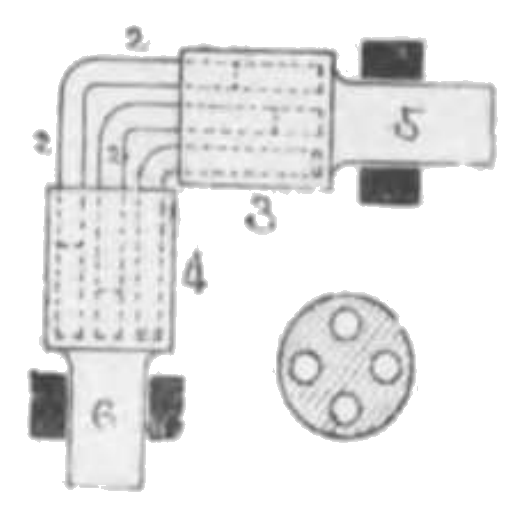
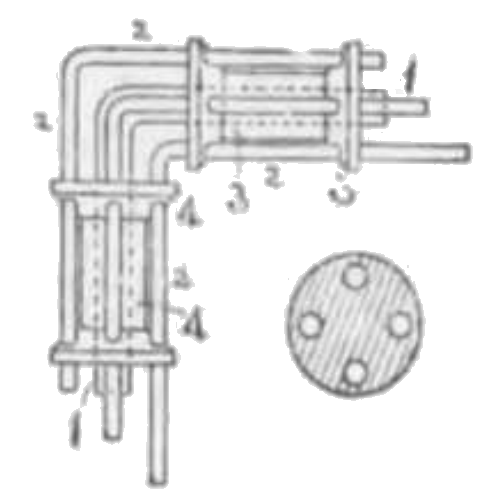
677. 同(其三)
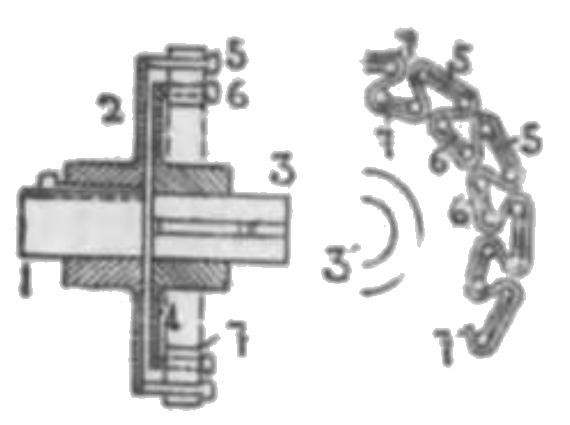
フランジ 2 より数多の突起 5 を輪周に等分に鋳出しフランジ 4 よりも同数の突起 6 を同様に鋳出す。革べルト 7 を右図に示す様に 5, 6, 5, 6 と順序に掛けて最後にその両端を綴づ。両軸 1, 3 は両軸線が多少傾斜又は振動するも動力を伝達し得。発電機と発動機又は機関の軸を直結する場合等に適す。
678. 同(其四)
2 のフランジ内面に等分に半径方向に板 5 を出し 4 のフランジ外面に等分に半径方向に前者と同数の板 6 を出し 5, 6 間に生皮を数枚鋲綴せるもの 7 を狭む。
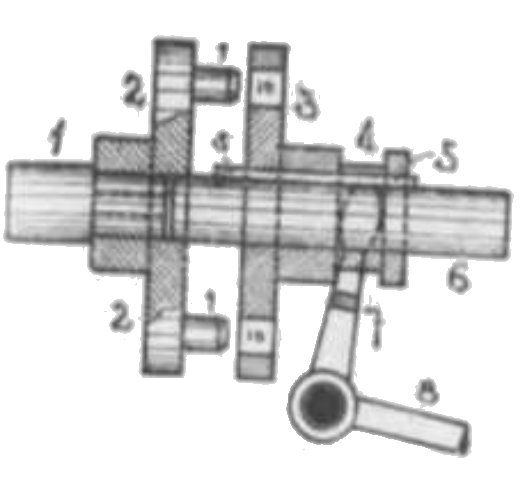
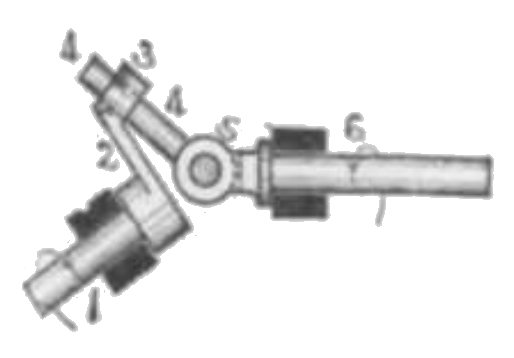
679. 摺木形接手(其一)Gyrating Lever Coupling.
両軸 1, 2 の軸線は直角にして且球軸受 4 の中心を通過す。丸棒 3, 3 は互いに直角にしてその軸線は球の中心を通過し且それぞれディスク(円板)と回りツガイを為す。軸 1 は軸 2 を回転す。この場合死点あり。形の上よりベルクランク円板接手 Bell-crank Disc Coupling の別名あり。
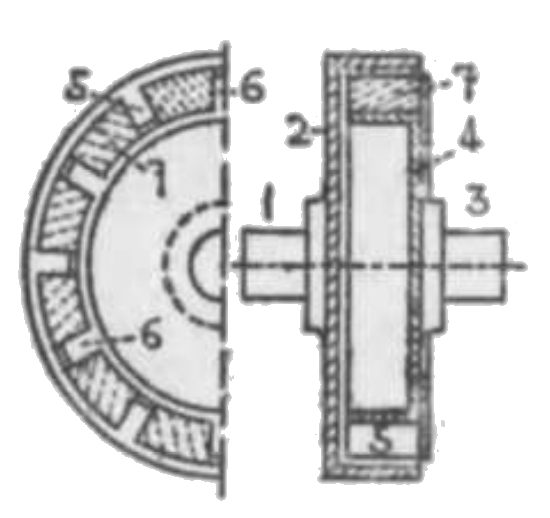
680. 遠心クラッチ Centrifugal Clutch.
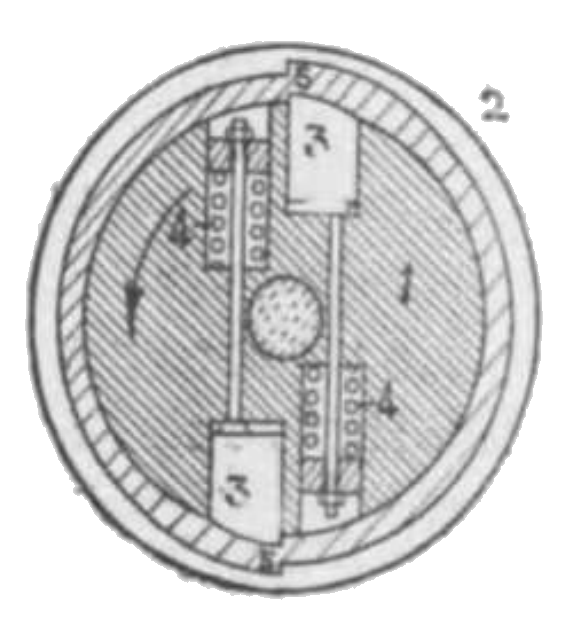
円板 1, 2 は軸線が一直線上にある二軸の端にそれぞれ固定せらる。1 が動者として回転するときその速度がある限度に達するまでは 1 のみ回転するが限度を超ゆるときは遠心力にて圧縮バネ 4 に打勝ちて爪 3 は飛び出でて 2 の内面の爪 5 に掛かりて 1, 2 は共に回転するが速度減ずるときは 3 が引き込みて 1 のみ回転す。速度の限度は圧縮バネ 4 の圧縮度によりて変更し得。
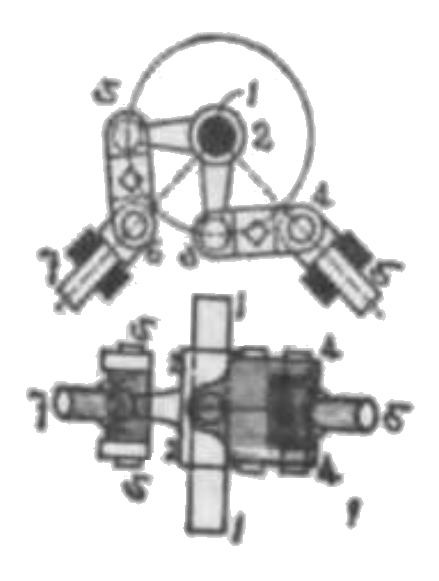
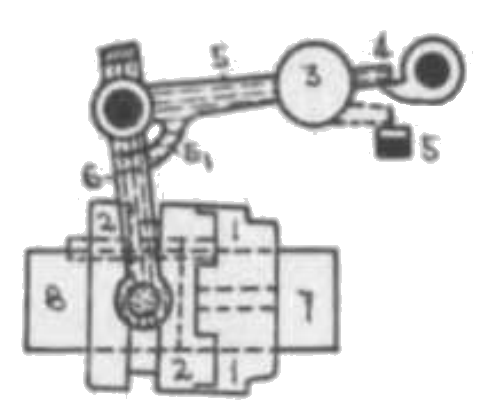
681. アングル・ドライバー Angle Driver.
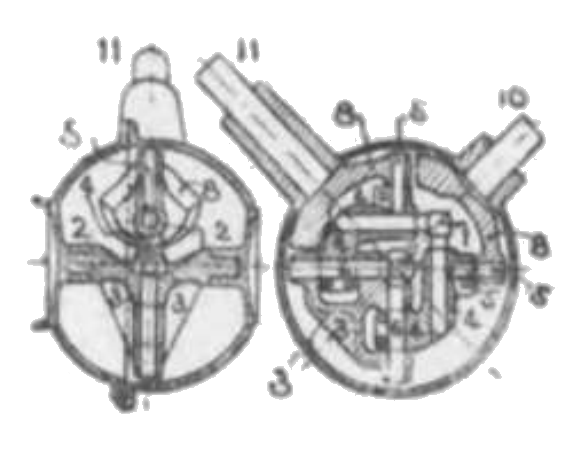
右図は本機の水平切断図、左図は垂直切断図。水平軸 10, 11 の軸線は同一平面上にありて且直角なり。リンク 3 は上下に支軸 2, 2 を(其軸線 22 は乗直にして 10, 11 両軸線の交点を通過す)有し之に取付く水平ピン 6, 6 の軸線は 10, 11 軸線と同一平面上にありて且互いに直交しその軸線の延長は垂直軸 22 上に相交わる。リンクも 4, 4 はそれぞれ 6, 6 を軸として振動す。
4, 4 は直角に曲がれる水平ピン 7 とそれぞれ滑りツガイを為す。又 4 より其軸 6 と直角に且中心線 22 と交わるピン 5 を出だし之が軸 10 端の腕 8 の穴 5 に入りて回りツガイを為す。軸 10 に連関する 6458 は軸 11 に連関せる 5458 と同形同大なり。軸 10 の等速一回転は軸 11 を等速に一回転せしむ。
682. クレメン接手 “Clemen” joint.
3 はリンク 34, 34 及び軸 1 あるいは 2 端を蝶番す。4 は球ツガイ。リンク 34 は何れも等長なり。軸 1 及び 2 は其位置にて回転す。二球の中心は軸 1 及び 2 の軸線とそれぞれ同一平面上にあらしむ。図の如く直線 33 と軸 12 の軸線の為す角度相等しきかあるいは両軸線が並行なれば両軸の速比は 1 なり。即ち軸 1 の等速回転は軸 2 を等速に回転せしむ。機構学上 (663) の変態と認め得。
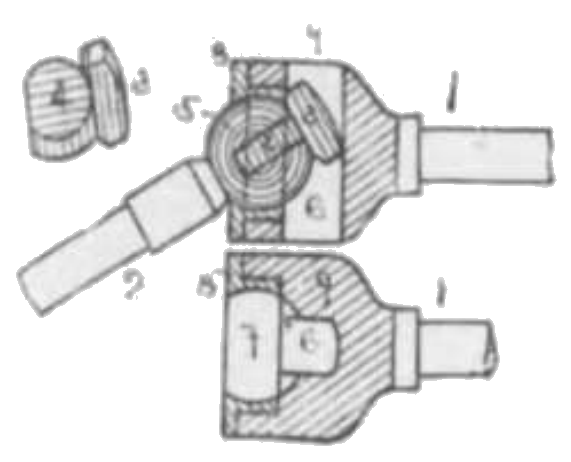
683. 角鞘接子(ブロック・ジョイント)Block Universal Joint.
軸 1 端に取付く角穴のフランジ 3 内に軸 2 端に取付く方形の駒 4 が緩みなく嵌まる。駒 4 の上下左右面は其中心より軸 2 に直角に且又互いに直角なる上下、左右の二軸をそれぞれ軸線とする円柱面なり。軸 1, 2 は傾斜する回転を伝う。“フック” 接手の変態なり。
684. 片寄軸の軸接ぎ Coupling of Offset Shafts.
並行軸 1, 2 はその軸線が少しく距たる。8 は 7 を挟み何れもそれぞれ 1, 2 軸端と直交ピン 5, 6 にて回りツガイを為す。1 の等速回転は 2 を等速に廻す。フック接ぎ手の変形なり。
685. 直交軸の軸接ぎ
8 は板 7 を挟み、7, 8 の端は何れも二又となり(71, 72 に示す如く)之が 1, 2 両軸端の正立方体を挟みピン 5, 6 にて蝶番せらる。ただし 1, 5; 2, 6 軸線は相交わる。両軸 1, 2 は直交し板 7 の面は両軸線と等角にて交わる(図にては 45°)。軸 1 は軸 2 を回転す。速比 1 にしてフック接手の変形なり。
686. 逆回転軸接ぎ
1, 2 は同一直線を主軸とする軸にして 5 は之に直角なる固定丸軸。5 と摺動する 6 より軸 5 に直角に出でたる丸棒 7, 8 は球 3, 4 を貫きこの球は軸端のアームの球ツガイを為す。構造は軸 6 に対し左右対称なり。軸 1 の回転は軸 2 を反方向に回転せしむ。速比は 1 なり。軸 1, 2 が少しく傾斜するも作用するがこの場合速比は 1 ならず。
687. 折れ曲る軸接ぎ
3, 4 はそれぞれ軸 1, 2 と回りツガイを為す。3, 4 より出でたる二本の腕は 5, 5 とて蝶番せらる。1, 2 の両端には (684) に示すが如き接ぎ手をなす。両軸 1, 2 は 5, 5 を折目に曲がり得るが両者 1, 2 の伝動は自由なり。
688. 自動的にクラッチ接手の外づるる仕掛
上図は重錘付テコ 3 が爪 4 にて支えられ且クラッチ 1, 2 は噛むが 4 が外づるるや 3 は落下して受片 5 にて支えられ同時にクラッチ 1, 2 の噛合は外づる。
689. 遠心力利用クラッチ
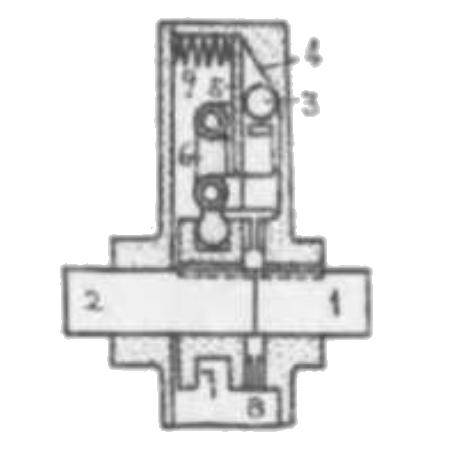
8 は両軸 1, 2 の噛合クラッチを形成す。軸 1 の回転速度がある限度に達するや球 3 の遠心力は斜面 4 と円板 5 の間に食入り、その為テコ 6 がスリープ 7 を右に動かしクラッチ 8 が組むにより軸 2 も回転す。1 の回転速度がある限度以下に降ればバネ 9 は球 3 の遠心力に抗して円板 5 を右に寄せクラッチ 8 を外づす。従て 2 は静止す。3, 6, 8 は数個配布せらる。
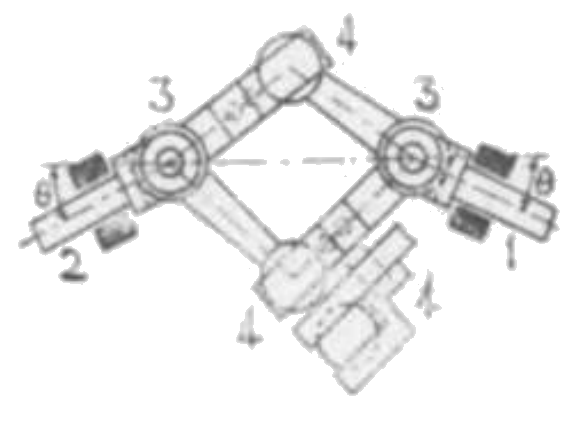
689.1. 捩りに対し変形せざるたわみ軸接ぎ Shaft Coupling rigid in Torsion only.
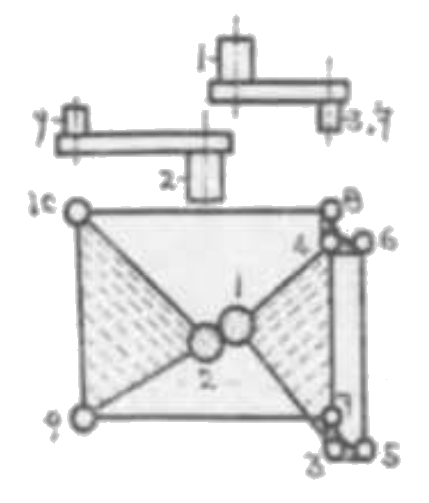
軸 1 は紙の手前に走る軸、2 は紙の後を走る軸にしてその両端殆ど相接す。1 のアームに同大同形のベルクランク 357, 468 ありて 34=56=9.10, 79=8.10, 2.9=2.10, 1.3=1.4。
何等差支えなく 1 軸の捩りモーメントを 2 軸に伝え得。両軸 1, 2 の距離が少しく変化するも伝動は差支えなし。